Страница 4 из 4
Re: Системы полного привода - краткая теория
Добавлено: Пн июн 16, 2025 3:50 pm
morskoj
Устройство системы TOD

- Устройство системы TOD
- Screenshot_31.jpg (164.12 КБ) 62 просмотра
Как показано на рисунке, в переднем мосту системы TOD отсутствует передний дифференциал свободного хода, и мост постоянно подключен. Поэтому применен обычный передний дифференциал. Выключатель позволяет выбрать только два режима. Автоматический: крутящий момент распределяется автоматически блоком управления раздаточной короб-кой. Полный привод работает по требованию: оптимальное распределение крутящего момента двигателя между задними и передними колесами обеспечивается раздаточной коробкой системы TOD. Эта раздаточная коробка управляется специальным блоком управления TCCM (блок управления раздаточной коробкой), который находится под перегородкой со стороны пассажира. Соотношение передачи крутящего момента на передние и задние колеса не фиксированное, оно постоянно изменяется и управляется в зависимости от дорожных условий и условий движения. Ниже приведено примерное распределение крутящего момента при определенных условиях движения. Понижающая передача: полный привод используется постоянно при включенной понижающей планетарной передаче для получения более высокого крутящего момента на колесах.
Re: Системы полного привода - краткая теория
Добавлено: Пн июн 16, 2025 3:51 pm
morskoj
Конструкция раздаточной коробки
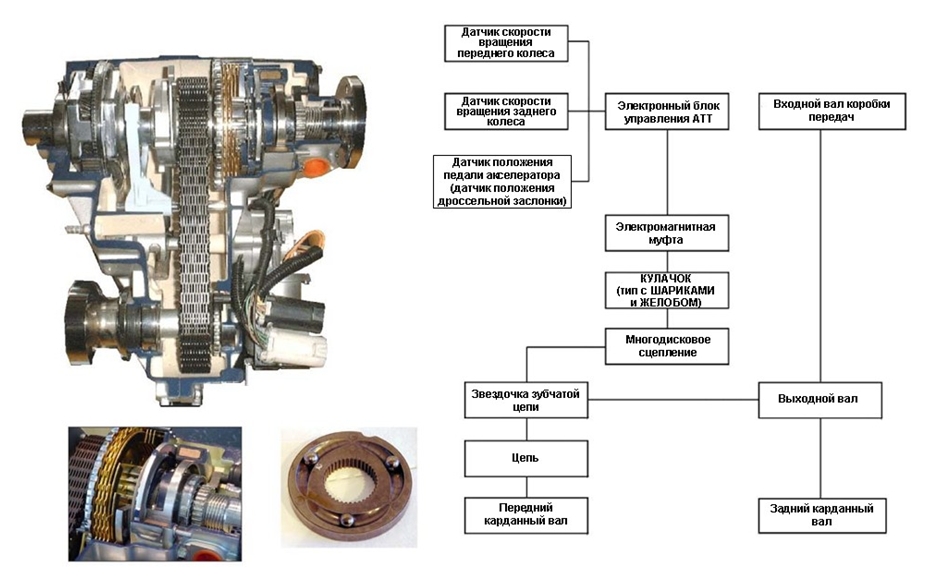
- Конструкция раздаточной коробки
- Screenshot_32.jpg (214.98 КБ) 61 просмотр
В целом конструкция раздаточной коробки очень схожа с коробкой системы EST, но блок включения полного привода с механической вилкой переключения заменен на много-дисковое сцепление. Работа этого сцепления очень схожа с работой сцепления используемого в системе ITM модели Sportage. При необходимости полного привода включается электромагнитная муфта, притягивая пластину, которая поворачивается, поддерживая желоб с шариками. При этом стальные шарики двигаются по желобу и нажимают на много-дисковое сцепление: полный привод включен. Поскольку передний мост постоянно подключен, карданный вал вращается даже при приводе на два колеса (вал приводится во вращение передним мостом), поэтому подключение и отключение заднего моста может быть выполнено очень плавно. Крутящий момент, подаваемый на передний мост, зависит от тока, подаваемого на муфту (силы магнитного поля), поскольку давление на много-дисковом сцеплении, создаваемое желобом шариков, зависит от силы притяжения пластины кулачка. На правой стороне показан поток мощности и последовательность включения системы. Основные сигналы следующие: сигналы датчиков скорости вращения передних и задних колес и сигнал датчика положения педали акселератора. На их основе блок управления ATT включает электромагнитную муфту приводя таким образом в действие многодисковое сцепление через желоб с шариками. Это обеспечивает передачу крутящего момента на передний карданный вал (через звездочку зубчатой цепи и цепь).
Re: Системы полного привода - краткая теория
Добавлено: Пн июн 16, 2025 3:52 pm
morskoj
Входные и выходные сигналы

- Входные и выходные сигналы
- Screenshot_33.jpg (253.05 КБ) 59 просмотров
Для правильной работы системы на блок управления раздаточной коробкой должно поступать несколько входных сигналов. Входные сигналы следующие. Сигнал датчика положения электродвигателя служит для определения положения электродвигателя переключения для включения понижающей передачи при полном приводе. Сигнал от переключателя автоматического режима и режима понижающей передачи для определения, выбран ли автоматический или понижающий режим полного привода. При автоматической коробке передач — сигнал нейтрального положения от реле нейтрального положения, которое управляется выключателем блокировки стартера. При механической коробке передач — сигнал датчика положения педали сцепления. Это необходимо для определения нейтрального положения автоматической коробки передач и нажатия на педаль сцепления при механической коробке передач (похоже на нейтральное положение) для облегчения включения понижающей передачи. Входной сигнал от датчиков скорости вращения колес для определения, стоит автомобиль или движется, для включения понижающей передачи полного привода, если выбран понижающий режим полного привода, для обнаружения пробуксовки колес (передних или задних) при автоматическом режиме. Сигнал датчика положения дроссельной заслонки для принятия решения о распределении крутящего момента на переднюю или заднюю ось при автоматическом режиме. Сигнал от выключателя стоп-сигнала для распознавания торможения и распределения крутящего момента от 0:100 и 10:90 в зависимости от скорости вращения передних и задних колес (для стабильного торможения с коротким тормозным путем). Сигнал ABS от ЭБУ ABS для определения работы ABS, в этом случае крутящий момент распределяется в соотношении 30:70 для стабильного торможения. После обработки входных сигналов блок управления раздаточной коробкой выдает выходные сигналы на: электродвигатель переключения передач для включения и выключения понижающей передачи. На электромагнитную муфту для управления распределением крутящего момента между передней и задней осью. На контрольные лампы LOW и 4WD для оповещения водителя и информирования о неисправности (лампа 4WD горит мигающим светом). Диагностический сигнал на тестер (по линии K) и при автоматической коробке передач — сигнал выбора понижающей передачи на блок управления коробкой передач для соответствующей адаптации программы переключения передач. Этот сигнал предназначен для переключения передач в связи с уменьшением общего передаточного числа.