Страница 2 из 3
Re: Передача данных в сети автомобилей
Добавлено: Вт июн 17, 2025 12:15 pm
morskoj
Классификация по скорости передачи данных
- Классификация по скорости передачи данных
- Screenshot_11.jpg (195.31 КБ) 167 просмотров
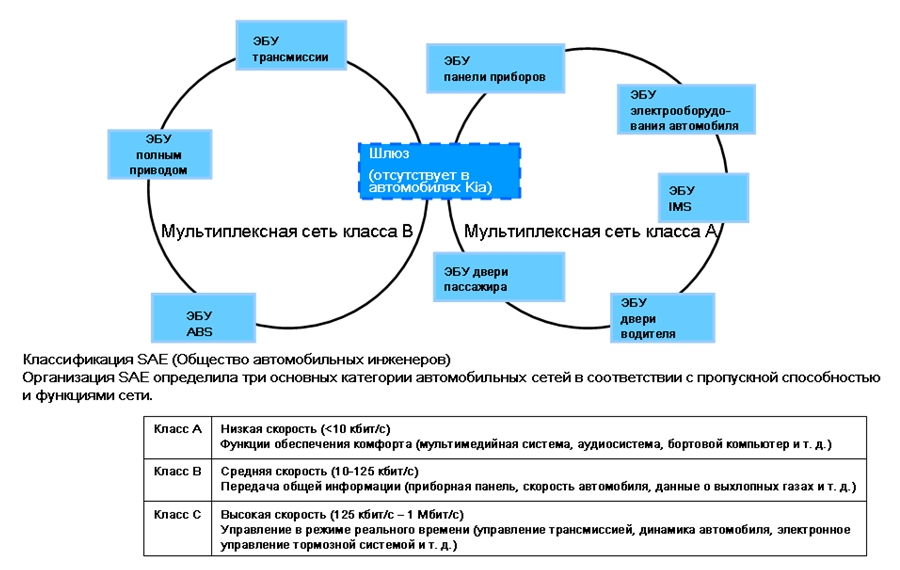
Классификация сетевых систем по скорости передачи данных согласно SAE
Класс A: низкая скорость (менее 10 кбит/с)
Применяется для функций обеспечения комфорта, таких как аудиосистема, бортовой компьютер, электростеклоподъемники и т. д.
Класс B: средняя скорость (10-125 кбит/с)
Применяется для передачи общей информации, такой как информация на приборной панели, скорость автомобиля и т. д.
Класс C: высокая скорость (125 кбит/с – 1 Мбит/с)
Управление в режиме реального времени, например управление трансмиссией, динамика автомобиля и т. д.
В классификации DIN/ISO предусмотрены только 2 категории:
низкая скорость — до 125 кбит/с
высокая скорость — более 125 кбит/с
Re: Передача данных в сети автомобилей
Добавлено: Вт июн 17, 2025 12:16 pm
morskoj
Синхронная передача данных
- Синхронная передача данных
- Screenshot_12.jpg (194.03 КБ) 165 просмотров
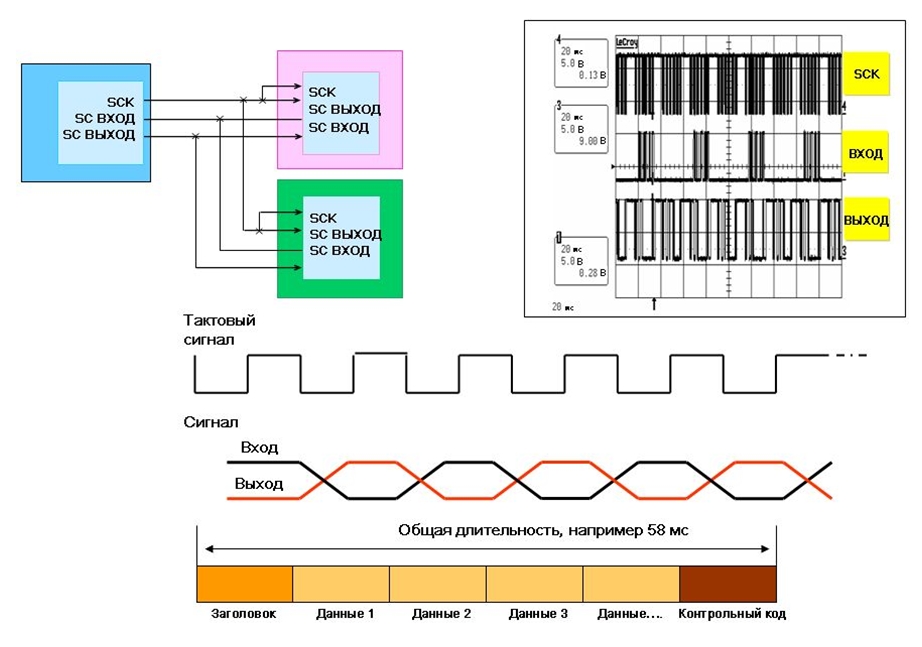
Как уже говорилось ранее, существуют два основных метода последовательной передачи данных: синхронная и асинхронная передача. В случае синхронной передачи данных связанные устройства производят инициализацию друг друга, а затем непрерывно передают данные, чтобы обеспечить синхронизацию. Иногда для передачи так называемого тактового сигнала выделяется специальная линия. Вследствие того, что передача данных между устройствами происходит постоянно, начальные и стоповые сигналы не требуются. В типичной системе синхронной передачи данных кроме линий передачи данных также присутствует линия синхронизации. Передача данных происходит периодически, т. е. каждому ЭБУ выделяется фиксированный интервал времени, в течение которого он может передавать свои данные. По этой причине необходимо обеспечить синхронизацию всех ЭБУ. Синхронизация осуществляется с помощью тактового сигнала. Как правило, используются три линии: одна для тактового сигнала, а две другие для передачи данных. В данном примере блок данных 1 может представлять систему ETACS, блок данных 2 — ЭБУ двери пассажира и т. д. Этот кадр данных будет передаваться регулярно с интервалом 58 мс даже в тех случаях, когда новые данные не поступают. В этом случае сообщение останется без изменений. Однако для синхронной передачи данных необязательно использовать три линии. Также можно применять двухпроводную линию связи и использовать одну линию для тактового сигнала, а другую для передачи данных. Существуют системы даже всего с одной линией. В этом случае синхронизация осуществляется с помощью специального блока сообщения, так называемого поля синхронизации. Примером такого метода служит шина LIN, в которой соответствующая информация находится в определенной части сообщения.
Re: Передача данных в сети автомобилей
Добавлено: Вт июн 17, 2025 12:17 pm
morskoj
Асинхронная передача данных
- Асинхронная передача данных
- Screenshot_13.jpg (141.94 КБ) 163 просмотра
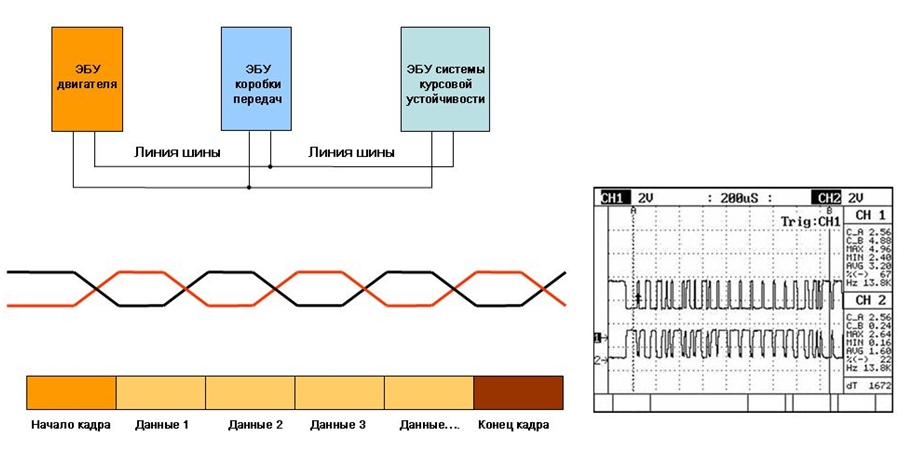
Второй метод — асинхронная передача данных. В этом случае передача данных происходит только тогда, когда это необходимо. Из-за отсутствия постоянного обмена данными необходимо использовать стартовый и стоповый биты. Когда требуется начать передачу данных, состояние линии изменяется с 1 на 0 (стартовый бит). В типичной системе асинхронной передачи данных имеется только линия передачи данных, но нет отдельной линии синхронизации. Форма сигнала и кадр данных имеют аналогичный вид. Важное отличие заключается в том, что кадр данных включает стартовый и стоповый биты. Линия передачи данных может состоять из одной линии или двух линий, как в примере на слайде. В этом случае для кодирования данных используется разность напряжений между двумя линиями. Например, отсутствие разности напряжений может представлять значение бита 1, а ее наличие — 0.
Re: Передача данных в сети автомобилей
Добавлено: Вт июн 17, 2025 12:17 pm
morskoj
Линия К

- Линия К
- Screenshot_14.jpg (208.7 КБ) 162 просмотра
Стандарт ISO 9141/SAE J 1978 определяет протокол для линии K. Линия K — это последовательная шина для обмена данными между диагностическим прибором Hi-scan pro или другим прибором и различными ЭБУ автомобиля. В данном случае в протоколе определено даже назначение контактов. Обратите внимание, что в разъеме канала передачи данных имеются контакты для различных коммуникационных линий. Для диагностики производители могут использовать различные протоколы. Кроме того, могут быть различия в протоколе в разных моделях автомобилей. По существу, подключенный диагностический прибор является просто еще одним устройством, участвующим в обмене данными по сети. Обмен данными между диагностическим прибором и соответствующим блоком управления похож на задавание вопросов и получение ответов на них. Диагностический прибор отправляет запрос блоку управления, а блок управления отвечает или выполняет соответствующие действия. Такой вопрос и ответ представляют собой пакеты данных, которые передаются побитно в определенном кадре данных.
Диагностический прибор отправляет запрос на определенный адрес, например ЭБУ двигателя, затем указывает так называемый режим, который описывает группу функций (например, связанных с кодами диагностики), и идентификатор PID, который определяет функцию в выбранном режиме (например, количество кодов DTC). Затем блок управления выдает определенный ответ с соответствующими данными. На начальных этапах каждый производитель использовал собственные схемы адресации и кодирования данных, но после внедрения бортовых систем диагностики была достигнута унификация формата адресов и данных, касающихся выхлопных газов, что позволило применять сторонние диагностические приборы.
В примере выше ЭБУ двигателя имеет адрес 08, задача считывания кодов диагностики относится к режиму 1, а на первом этапе необходимо выяснить количество имеющихся кодов неисправностей (этому действию соответствует идентификатор PID 01). Получив запрос от диагностического прибора, блок управления предоставляет соответствующий ответ, содержащий подтверждение режима, идентификатор PID запроса и результат. При наличии неисправности ответ может иметь следующий вид:
00 00 0001 0100 0011 для P 0 1 4 3
Два первых блока содержат только по два бита, так как этого достаточно для представления всех возможных вариантов. Примечание: в некоторых моделях автомобилей имеется вторая шина CAN от ЭБУ двигателя (ECM) или ЭБУ силовой передачи (PCM) к универсальному разъему (в моторном отсеке). Эта шина предназначена для перепрограммирования ЭБУ, а не для диагностики.
Re: Передача данных в сети автомобилей
Добавлено: Вт июн 17, 2025 12:18 pm
morskoj
Шина CAN
- Шина CAN
- Screenshot_15.jpg (181.35 КБ) 160 просмотров
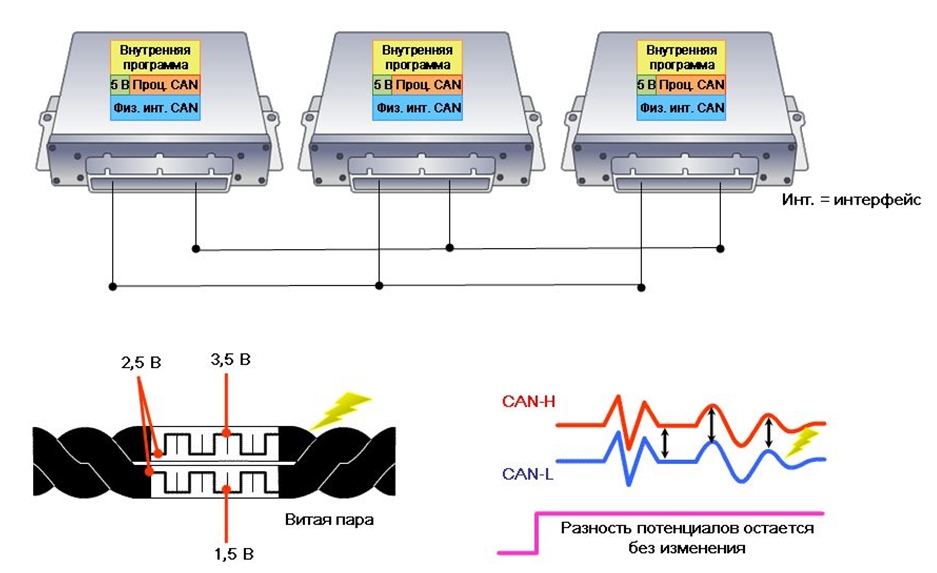
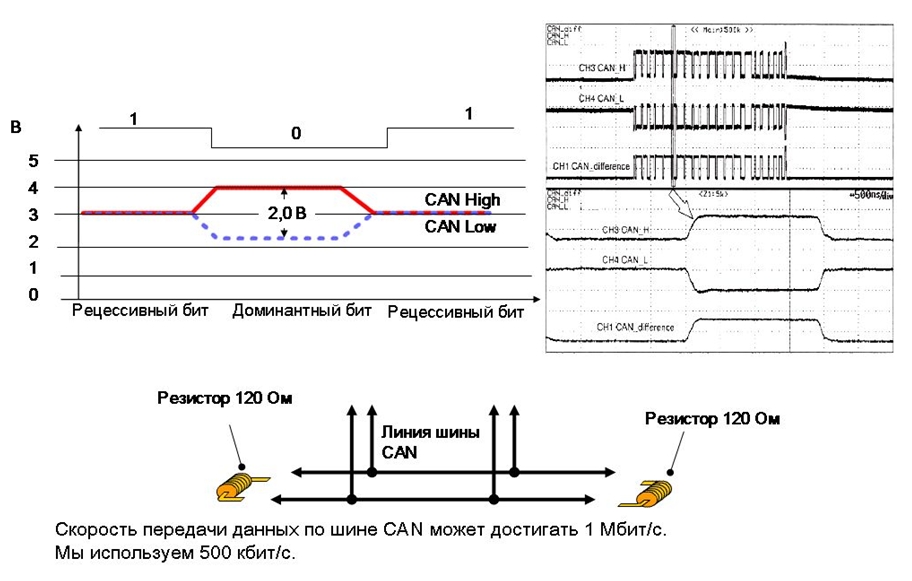
При использовании шины CAN (Controller Area Network) все задействованные ЭБУ подключены только к двум проводам — CAN High и CAN Low. Для передачи информации используется разностный сигнал, т. е. разность напряжений между проводами High и Low. Пропускная способность шины CAN может достигать 1 Мбит/с, но в наших автомобилях применяется фиксированная скорость 500 кбит/с. Очень часто два провода скручены между собой. Это делается для того, чтобы при наличии помех изменение напряжения было одинаковым на обеих линиях. В этом случае разность напряжений не изменяется, и, соответственно, помехи не будут оказывать влияния на состояние бита (1 или 0). Другой способ снижения влияния помех на сигнал CAN заключается в установке нагрузочных резисторов на каждом из концов шины CAN. Сопротивление каждого резистора составляет 120 Ом. Передача данных через шину CAN будет возможна даже в случае повреждения или удаления резисторов. Очевидно, такая ситуация приведет к «странному» поведению системы и возникновению кодов DTC. Обратите внимание на то, что шина отвечает только за передачу и отбор сообщений между ЭБУ. Шина не оказывает влияния на обработку данных. Рассмотрим пример, в котором требуется передать информацию о температуре охлаждающей жидкости двигателя от одного ЭБУ другому. Этот процесс протекает следующим образом. ЭБУ 1 получает аналоговый сигнал от датчика температуры охлаждающей жидкости двигателя. Внутренняя программа ЭБУ преобразует этот сигнал в цифровую форму и обрабатывает его. Чтобы отправить данные на другой ЭБУ, внутренняя программа передает цифровые данные процессору CAN. Процессор CAN преобразует данные в формат CAN и передает их физическому интерфейсу CAN, который создает сигналы определенного уровня на линии шины. Физические интерфейсы других узлов принимают сигнал. Сигнал преобразуется обратно в форму, понятную процессору CAN. Процессор проверяет приоритет и релевантность сигнала для соответствующего ЭБУ. Если информация релевантна, она передается внутренней программе ЭБУ для дальнейшей обработки. Если нет, она игнорируется.
Re: Передача данных в сети автомобилей
Добавлено: Вт июн 17, 2025 12:19 pm
morskoj
Передача данных по шине CAN
- Передача данных по шине CAN
- Screenshot_16.jpg (195.12 КБ) 159 просмотров
Для создания цифрового сигнала контроллер CAN изменяет разность напряжений между линиями High и Low. Значение бита 1 (рецессивный) представлено напряжением 2,5 В на обеих линиях =>разность напряжений составляет 0 В, а разность с «массой» — 2,5 В для каждой линии. Значение бита 0 (доминантный) представлено напряжением 3,5 В на линии High и 1,5 В на линии Low => разность напряжений между ними составляет 2 В. В случае разрыва одной из линий контроллер CAN переходит в отказоустойчивый режим, в котором для передачи данных используются низкое и высокое напряжение на оставшейся линии. Резисторы на линии служат для двух основных целей: не допустить интерференции сигналов на двух линиях, так как каждый из проводов при скорости передачи данных 500 000 бит в секунду действует в качестве высокочастотной антенны. Обеспечивать надлежащий уровень напряжения на сигнальных линиях.
Re: Передача данных в сети автомобилей
Добавлено: Вт июн 17, 2025 12:20 pm
morskoj
Схема «монтажное И»/кадр данных
- Схема «монтажное И»/кадр данных
- Screenshot_17.jpg (193.53 КБ) 158 просмотров
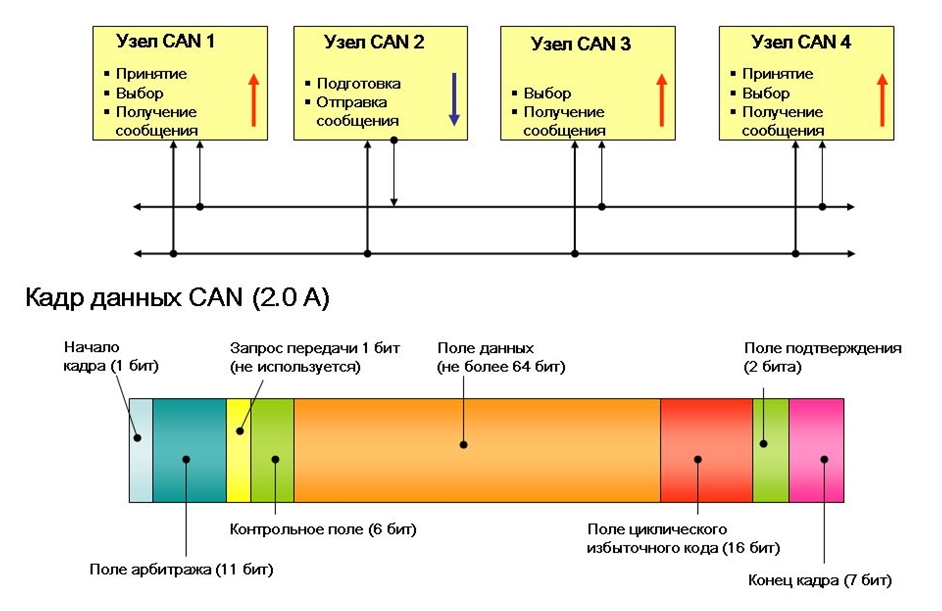
Чтобы понять, как осуществляется арбитраж, необходимо знать, что в шине CAN используется так называемая схема «монтажное И». Это означает, что все узлы одновременно отправляют и принимают сигнал. Любой узел, отправляющий сообщение, одновременно проверяет наличие сигнала и сравнивает его с отправляемым сигналом. Как происходит передача сообщения.
Подготовка: контроллер CAN обрабатывает данные, полученные от микропроцессора, и подготавливает их к отправке.
Отправка сообщения: трансивер CAN получает данные от контроллера CAN, преобразует их в электрические сигналы и отправляет их на шину передачи данных.
Получение сообщения: все остальные узлы, подключенные к шине, и сам отправитель получают данные.
Выбор: каждый блок управления проверяет содержимое полученного сообщения и определяет, релевантно оно или нет.
Принятие:
Если сообщение является релевантным для блока управления, оно принимается на обработку.
Бит начала кадра сообщает всем блокам управления о том, что начинается новое сообщение.
Поле арбитража играет важную роль, поскольку эта последовательность битов определяет приоритет сообщения. Подробно процесс арбитража будет рассмотрен далее. Поле запроса передачи (RTR) длиной 1 бит больше не используется. Ранее этот бит использовался для запроса информации от другого ЭБУ. Контрольное поле содержит сведения об общей длине сообщения, поскольку она может быть переменной. Это один из признаков, используемых для проверки правильности приема. Поле данных содержит сведения, которые требуется передать. Длина поля данных может быть разной. Максимальная длина составляет 8 байт = 64 бита. Еще одним средством проверки правильности приема сообщения служит поле циклического избыточного кода. Поле подтверждения является сигналом подтверждения правильности и полноты приема сообщения. Конец кадра указывает на конец сообщения. В настоящее время в основном используются 2 версии высокоскоростной шины CAN, 2.0 A и 2.0 B, различающиеся количеством бит, выделенных для идентификатора: 11 бит в версии 2.0 A и 29 бит в версии 2.0 B.
Re: Передача данных в сети автомобилей
Добавлено: Вт июн 17, 2025 12:21 pm
morskoj
Арбитраж (разрешение конфликтов) с сфере передачи данных
- Арбитраж (разрешение конфликтов) с сфере передачи данных
- Screenshot_18.jpg (107.39 КБ) 152 просмотра
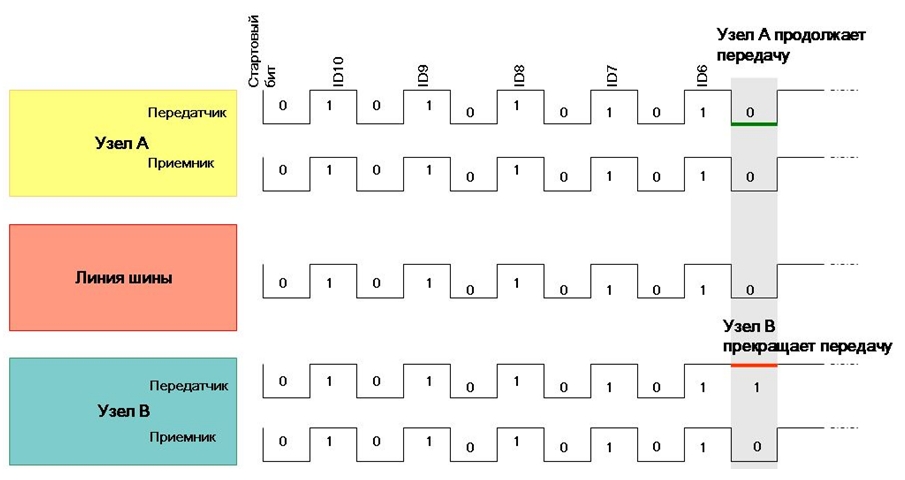
Процесс арбитража происходит следующим образом. В данном примере два ЭБУ (узла) одновременно начинают передавать сообщение. Узел A отправляет доминантный бит (0) и получает от шины сигнал 0. Аналогичное верно и для узла B. Если оба узла обнаружат на шине то же самое значение, которое они отправили на шину, оба узла продолжат отправку сообщения. Затем оба узла отправляют/получают сигнал 1. Как и ранее, они продолжают отправку. Это будет продолжаться до тех пор, пока оба узла отправляют одинаковое значение. Однако затем узел A отправляет 0, а узел B — 1. Узел A продолжит отправку, поскольку отправляемый и получаемый сигналы совпадают. Однако на узле B возникнет другая ситуация. Этот узел отправил 1, а получает 0. Поскольку 0 имеет более высокий приоритет чем 1, узел B распознает, что на шине имеется более важное сообщение, прекратит передачу и перейдет в режим только приема. Основное преимущество этого метода заключается в том, что «победитель» арбитража просто продолжит отправку своего сообщения без каких-либо задержек. Это называется доступом к информации без ее разрушения (NDA). После такого арбитража передача данных будет продолжаться даже в том случае, если на шине появится сообщение с более высоким приоритетом. Процесс арбитража обеспечивает предсказуемое максимальное время задержки важного сообщения (это время примерно равно времени передачи одного сообщения).
Re: Передача данных в сети автомобилей
Добавлено: Вт июн 17, 2025 12:22 pm
morskoj
Низкоскоростная шина CAN в автомобиле OPIRUS
- Низкоскоростная шина CAN в автомобиле OPIRUS
- Screenshot_19.jpg (205.95 КБ) 151 просмотр
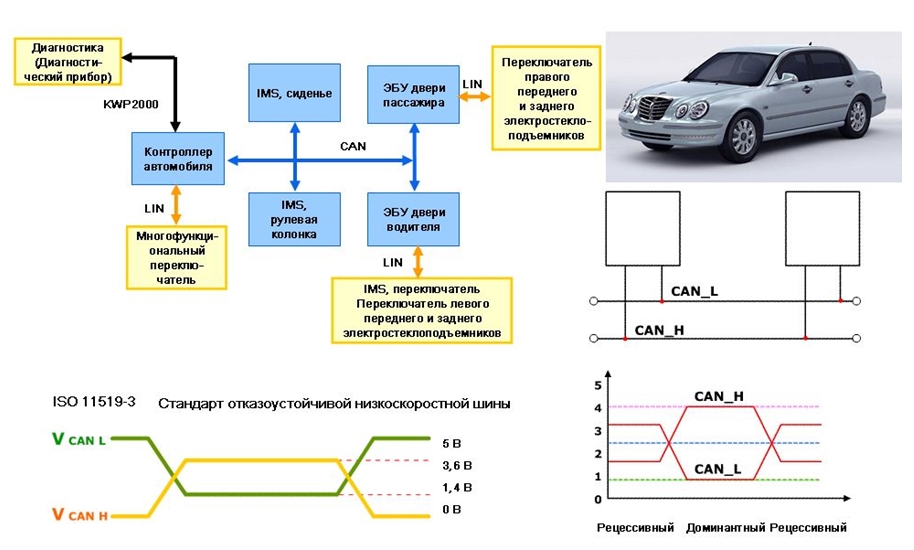
Существуют различные типы шин CAN, что отражено в их классификации. До этого слайда приводилось описание высокоскоростной шины CAN (версия 2.0 A), которая используется для передачи данных трансмиссии или систем безопасности, таких как система ESP. Другие версии шин CAN выполняют аналогичную функцию и имеют такой же принцип работы. Но есть и некоторые отличия, которые описаны далее. Очевидно, что основное отличие заключается в скорости передачи данных, но также отличаются и используемое напряжение, количество и местоположение резисторов. Низкоскоростная шина CAN используется для не критических по времени систем, например систем обеспечения комфорта. Различные версии низкоскоростной шины определены в стандартах ISO 11519-2 и ISO 11519-3. Например, низкоскоростная шина CAN используется в новом автомобиле Grandeur в системе обеспечения комфорта для обмена данными с интегрированной системой запоминания положения.
Примечание. Кроме этих основных версий шины CAN, существуют и другие версии, например TT CAN (Time Triggered CAN), в которой также используются фиксированные временные кадры.
Re: Передача данных в сети автомобилей
Добавлено: Вт июн 17, 2025 12:22 pm
morskoj
Шина LIN

- Шина LIN
- Screenshot_20.jpg (186.87 КБ) 150 просмотров
Аббревиатура LIN обозначает Local Interconnect Network (Локальная коммутируемая сеть). К типичным применениям шины LIN относятся законченные узлы, такие как дверной модуль, руль, сиденья, управление климатом и светом, датчик дождя или переключатели. Применение недорогой системы LIN дает возможность использовать в таких узлах электронно-механические компоненты, такие как интеллектуальные датчики, исполнительные механизмы или освещение. Их можно легко подключить к сети автомобиля и использовать для диагностики и обслуживания.